Soft Mechatronics for BioRobotics Laboratory

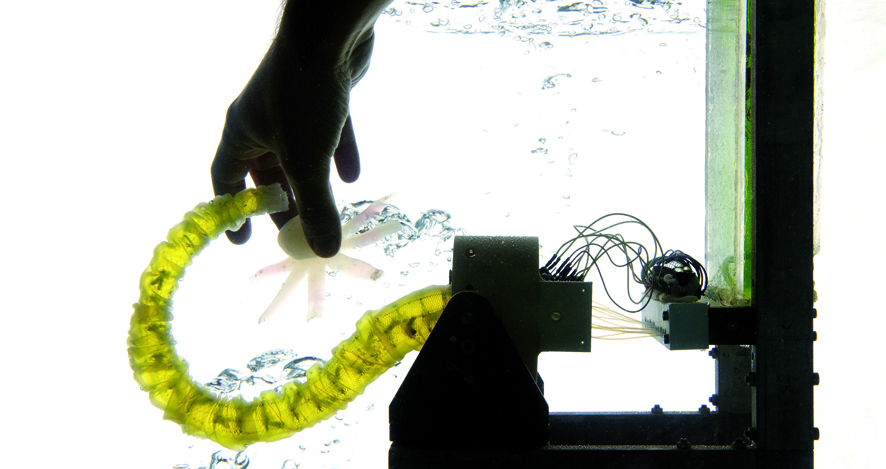
L’obiettivo del Soft Mechatronics for Biorobotics Lab è sviluppare una serie di tecnologie abilitanti per la Soft Robotics. L’utilizzo di componenti soft, elastici e deformabili con rigidità variabile infatti è un fattore chiave per garantire interazioni sicure ed efficaci in ambienti non strutturati, aprendo ai robot una vasta gamma di possibilità di applicazione.
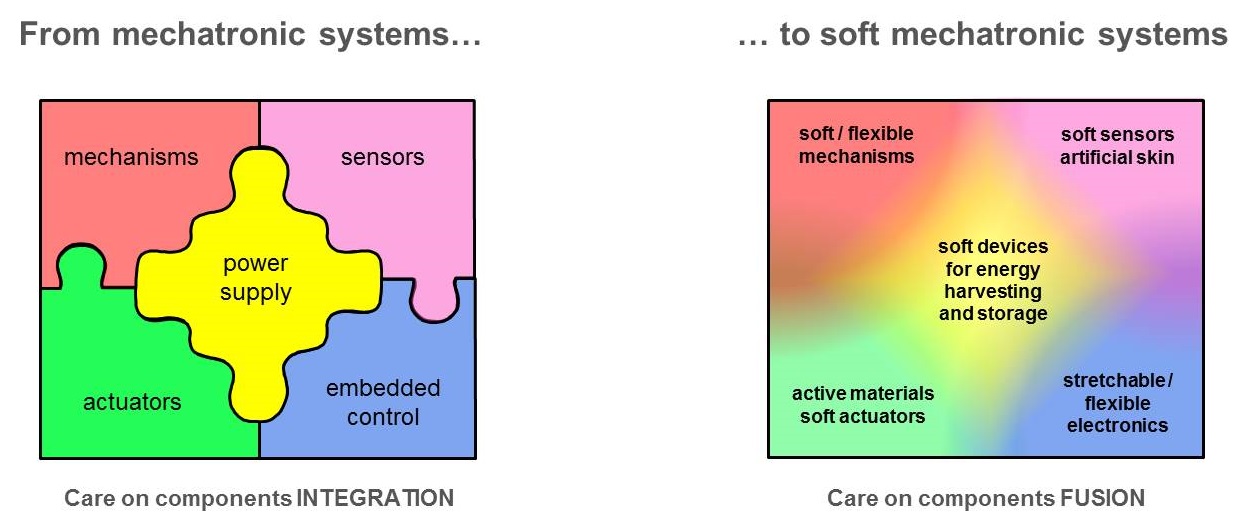
Ma la Soft Robotics può dimostrare tutte le sue potenzialità solo se tutti i componenti del sistema sono contestualmente presi in considerazione, superando anche l'approccio biomeccatronico in termini di progettazione integrata.
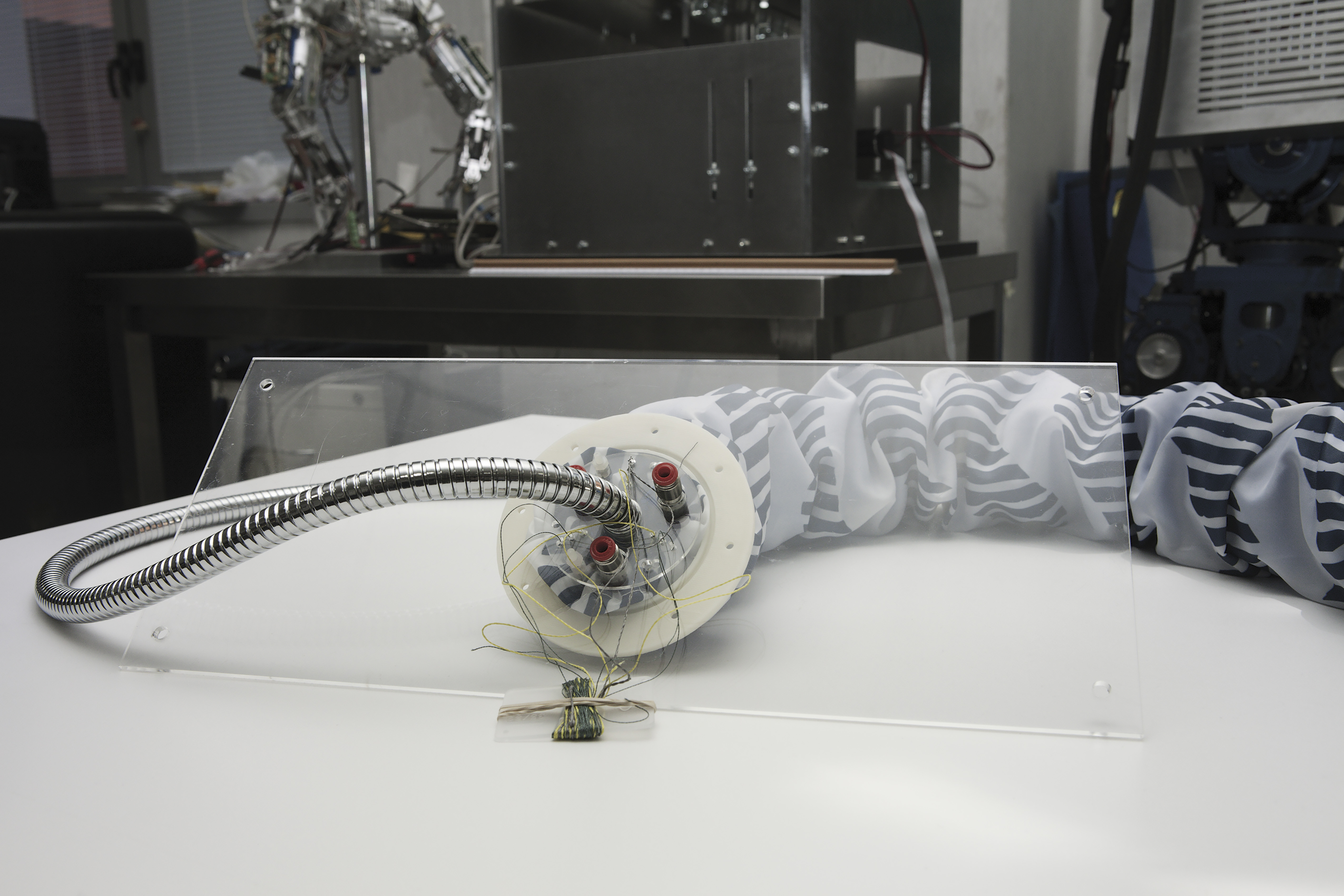
Numerosi sforzi sono stati concentrati sullo sviluppo di nuovi sensori complianti, attuatori soft, batterie e meccanismi flessibili, ma il più deve ancora essere fatto. In particolare, gli attuatori rappresentano un vero collo di bottiglia, ma negli ultimi anni nuove e promettenti tecnologie meccatroniche soft stanno emergendo (polimeri elettroattivi; EAP, materiali a memoria di forma; SMM, attuatori fluidici flessibili; FFA, granular jamming; GJ, fluidi elettromagnetici; ERF/MRF) e stanno già offrendo nuove possibilità di colmare il divario tra i muscoli naturali e artificiali.