POLPO: SEGRETI DI BRACCI E VENTOSE FINALMENTE SVELATI DA SANT’ANNA E IIT PER SVILUPPARE NUOVI ROBOT “MORBIDI”

Il lavoro congiunto dei ricercatori dei BioLabs dell’Istituto di Scienze della Vita
Mediante tecniche di crio-microscopia elettronica, che utilizzano microscopi elettronici raffreddati a – 180°C e permettono di analizzare i campioni nel loro stato naturale idratato, è stata mostrata la micro-morfologia delle ventose e delle braccia del polpo.
Questa ricerca è stata svolta nell’ambito del progetto europeo “Octopus”, co-finanziato dalla Commissione Europea, Programma ICT “Future and Emerging Technologies” e coordinato da Cecilia Laschi, docente di Bioingegneria all’Istituto di BioRobotica della Scuola Superiore Sant’Anna.
Grazie al lavoro dei ricercatori, è stata mostrata sulla superficie esterna delle braccia la complessa distribuzione dei pori, fondamentali nell’assorbimento cutaneo dell’ossigeno. Inoltre al loro interno è stata osservata l’architettura tridimensionale dei numerosi tipi di fasci muscolari che avvolgono il cordone nervoso centrale, organi che permettono al polpo di svolgere le funzioni che caratterizzano le sue abilità.
Nelle ventose è stato descritto il meccanismo di ricambio cellulare dell’infundibulum (la porzione più esterna della ventosa che entra in contatto con le superfici), le caratteristiche esterne e interne dei denticles (micrometrici rilievi a forma di cupola, perforati da pori di 100nm, che ricoprono la superficie interna della ventosa), mostrando a dettaglio nanometrico i canali dei loro pori che consentono alle terminazioni nervose di entrare in contatto con l’acqua di mare.
“Siamo soddisfatti per aver ottenuto questo importante risultato – commenta Antonio Minnocci, a nome dei ricercatori della Scuola Superiore Sant’Anna e dell’Istituto Italiano di Tecnologia - mostrando le strutture anatomiche del polpo, coinvolte in alcune delle sue incredibili capacità funzionali. Questo obiettivo giunge alla fine di un lungo lavoro di ricerca, che ha coinvolto un gruppo interdisciplinare con diverse competenze. Il lavoro è stato portato avanti in maniera congiunta – prosegue - per arrivare a descrivere quello che l’evoluzione ha differenziato nel tempo e per cercare di riprodurlo in dispositivi robotici. Per raggiungere questo obiettivo, per la prima volta, si progetta l’utilizzo di materiali soffici per realizzare robot, da qui il termine ‘soft robotics’, dotati di strutture simili a quelle della controparte biologica, che abbiamo osservato e utilizzato come fonte di ispirazione. Questo intento è certamente più difficile da raggiungere, ma per questo motivo la sfida ci appare ancora più affascinante”. Una robotica morbida ed ispirata alla natura che trova numerose potenziali applicazioni, dall’automazione industriale alla robotica applicata in campo biomedicale o domestico.
Per approfondimenti http://onlinelibrary.wiley.
Discalia delle immagini
-
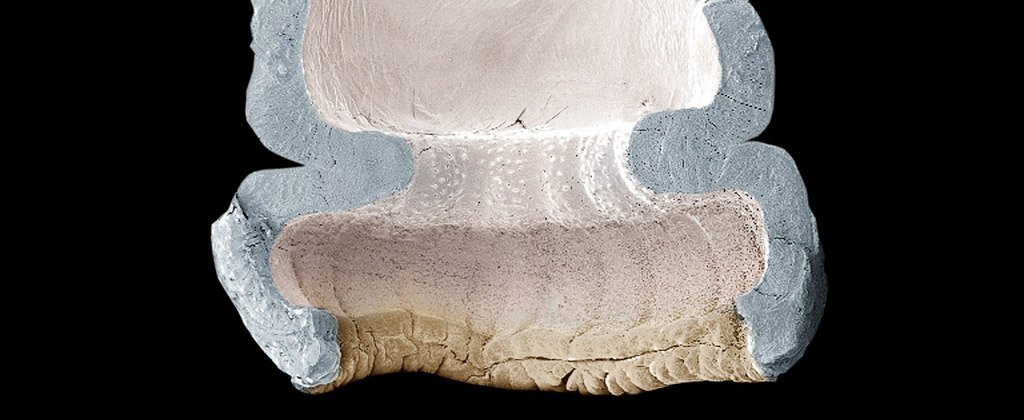
Ventosa crio-fratturata sagittalmente in modo da esporre l’interno delle sue due cavità, in basso la più esterna (“infundibulum”), in alto la più grande (“acetabulum”).
-
Singola fibra muscolare (in rosso, diametro=6 millesimi di millimetro) dei muscoli circolari dello sfintere dell’infundibulum, circondata da particelle di tessuto connettivo (in bianco).
-
Fibre di muscoli meridionali (in rosso) coinvolte nell’apertura dell’orifizio esterno della ventosa. In primo piano la rete di fibre di derma (in bianco) che li avvolge.
-
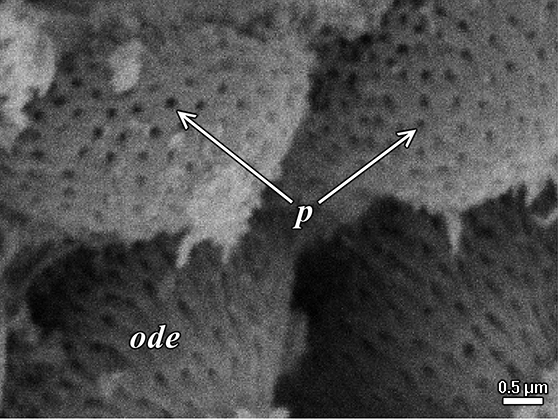
Dettaglio di alcuni denticles che ricoprono la superficie interna della ventosa, micrometrici rilievi a forma di cupola, perforati da pori (p) di circa 100 nanometri di diametro.
-
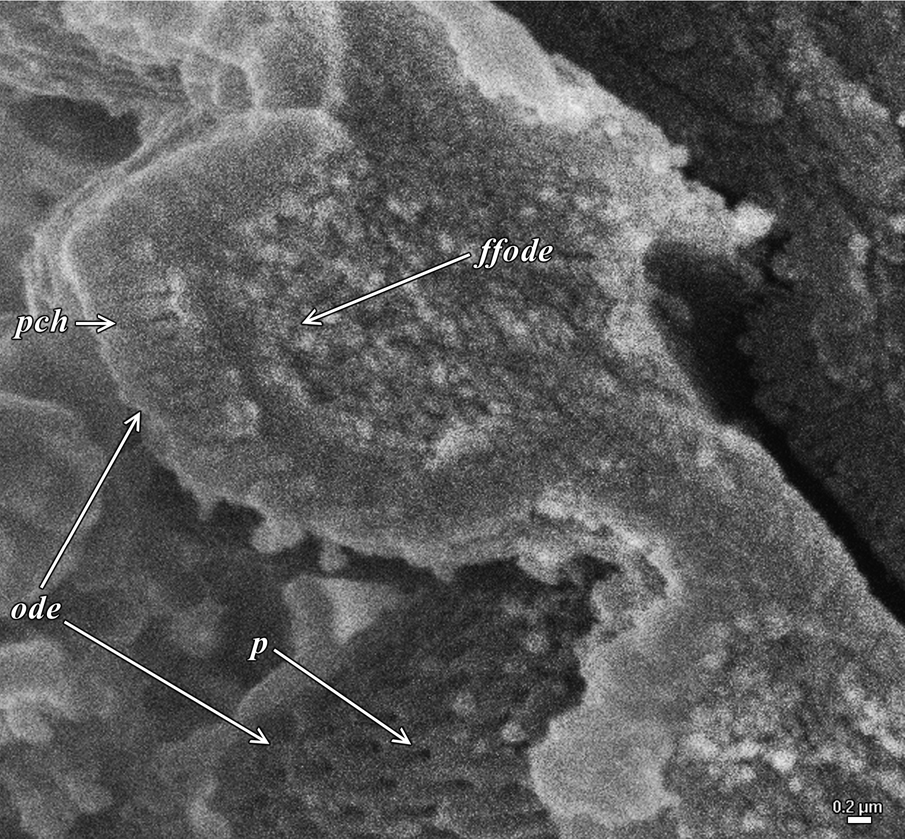
Frattura longitudinale di un singolo denticle in modo da esporre i canali (pch, diametro = 120 nanometri) posizionati sotto l’apertura esterna dei loro pori (p).
-
In primo piano il rivestimento superficiale dell’infundibulum, durante il distacco in seguito all’usura, a sinistra sul retro la nuova superficie con i nuovi denticles (nde) in formazione.
-
Frattura trasversale del braccio con i suoi organi interni: a sinistra la parte inferiore con due ventose (suckers), al centro il cordone nervoso (anc) circondato dall’intreccio dei diversi tipi di muscoli.
-
Dettaglio della struttura fine all’interno del braccio con le varie fibre muscolari intrecciate, la guaina connettiva che le circonda (oct), piccoli nervi (inc) e una vena (v).
-
Struttura complessiva del prototipo di braccio artificiale di polpo.
-
Prototipo di braccio artificiale di polpo: particolare del sistema di attuazione trasversale.
-
Prototipo di braccio artificiale di polpo: braccio operativo in acqua rivestito dalla pelle artificiale isolante.
-
Bannersucker: Ventosa di polpo crio-fratturata con all’interno le due cavità: in basso la più esterna (“infundibulum”), in alto l'“acetabulum”.