ROBOTIC TELE-PALPATION WITH GESTURAL CONTROL AND TACTILE FEEDBACK: PUBLISHED A STUDY OF THE BIOROBOTICS INSTITUTE OF SANT'ANNA SCHOOL OF ADVANCED STUDIES ABLE TO SUPPLY INFORMATION ON STIFFNESS OF LUMPS
To allow a person to appreciate the stiffness of a lump remotely using a robot. It is the content of the study of a group of researchers from The BioRobotics Institute of Sant'Anna School of Advanced Studies, which presents the development of a robotic platform with gestural control and tactile feedback to recognize the presence of lumps within soft materials.
The study was carried out in collaboration with the Department of Mechanical and Aerospace Engineering of the La Sapienza University of Rome, the Department of Comparative Linguistic and Cultural Studies of the Ca’ Foscari University of Venice, the Department of Information Engineering of the University of Florence, the Institute of Applied Physics “Nello Carrara” of the National Research Council, the Department of Control and Computer Engineering of the Polytechnic of Turin and the University of Belgrade. In the future, the ability to appreciate the stiffness of remote objects will allow applications in various scenarios, including robotic surgery and medical teleconsultation, and in assistive and rescue robotics.
The study was carried out thanks to the synergies established among multiple research projects with complementary purposes. In particular, the robotic platform was developed for medical diagnostic applications within the IMEROS project, funded by the Tuscany Region in the FAS Salute program, the haptic glove within the PARLOMA project funded by the Italian Ministry of Education, University and Research, the control algorithms in the context of the project of particular relevance Italy-Serbia funded by the Ministry of Foreign Affairs and International Cooperation, feedback algorithms in collaboration with INAIL in the framework of the MOTU project, and the telepresence scenario has been tested as part of a project funded by the Dubai Future Foundation through the Guaana.com platform.
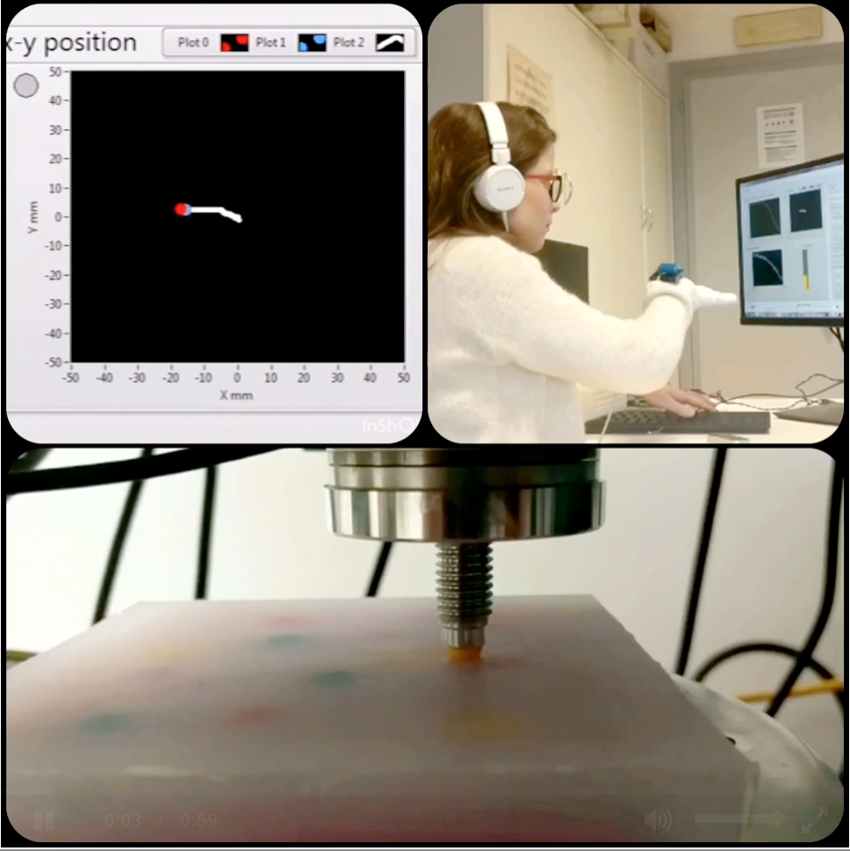
"We show up a new apparatus to telepalpation - says Luca Massari, who is concluding his PhD at The BioRobotics Institute of Sant'Anna School of Advanced Studies and is a current research fellow of Ca’ Foscari University of Venice - which allows a user to freely explore an object, specifically a silicone phantom in order to recognize the presence of nodules (materials with different stiffness included within the polymer matrix). Thanks to the gestural control and based exclusively on the tactile return administered, the identification occurs in real time, in the absence of a physical contact between the user's hand and the object investigated, which could be in another continent".
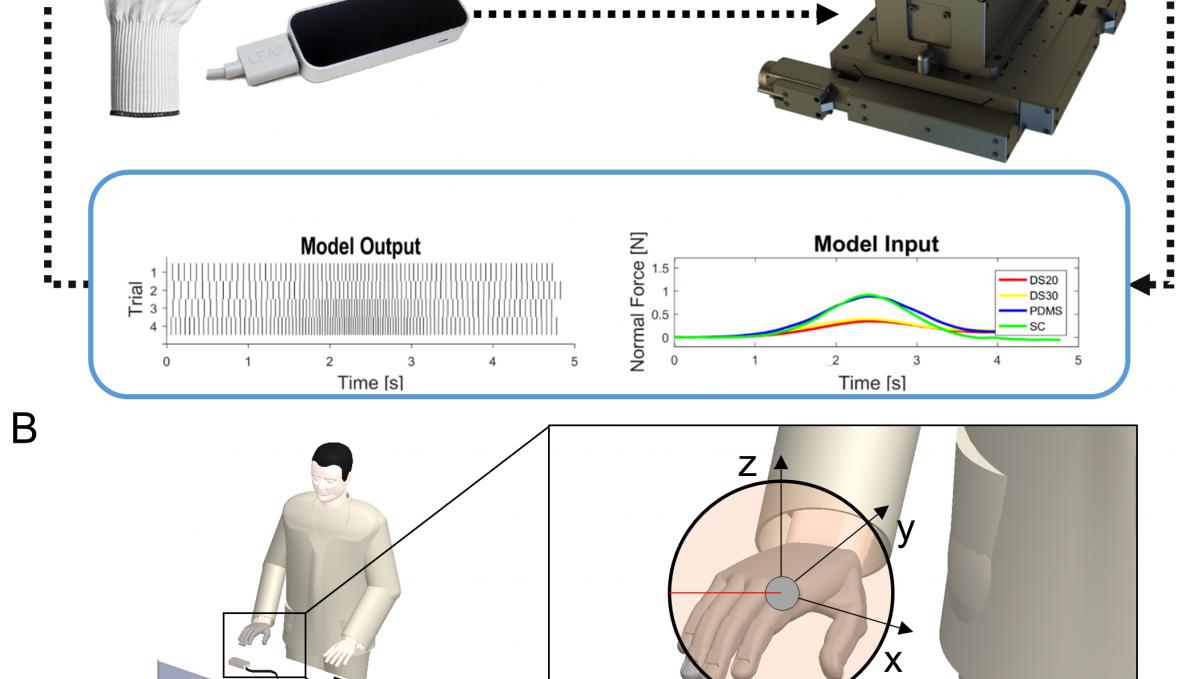
The stiffness of the phantom and the materials thereon allocated has been encoded using a neuromorphic model and reproduced on the index fingertip of the remote user thanks to a haptic glove integrated with a piezoelectric transducer.
"We evaluated the effectiveness of this feedback in allowing real-time identification in two experimental conditions of telepresence - explains Jessica D'Abbraccio, PhD student of The BioRobotics Institute of Sant'Anna School of Advanced Studies -: initially, in the "ILS" condition (In Line of Sight), the platform and the user were in the same environment; in a second experiment, under the more demanding "NILS" condition (Not In Light of Sight), the robotic platform has been moved 50 kilometers apart from the operator".
During the experiments, the users were asked to recognize more rigid areas randomly hidden within the test object, with four rubber materials being used to obtain the 12 hemispherical lumps with 5 millimeters radius.
"This activity is the result of a well-established collaboration between our research groups, which also involved students and researchers from various institutions, mobilized in periods of study and joint experimental activities", is being remarked by Eduardo Palermo, assistant professor of Mechanical Measurements and Biomechanics of "La Sapienza" University of Rome and Lorenzo Capineri, associate professor of Electronics at the University of Florence.
“This work evaluates the usability of the tactile system developed in robotic tele-palpation, to locate, during active exploration, nodules inserted within a softer matrix- concludes Calogero Oddo, coordinator of the study carried out in collaboration with prof Arianna Menciassi -. The enabling technologies developed will be applied in various fields: from bioengineering to Industry 4.0.”.
REFERENCES OF THE ARTICLE:
Jessica D’Abbraccio, Luca Massari, Sahana Prasanna, Laura Baldini, Francesca Sorgini, Giuseppe Airò Farulla, Andrea Bulletti, Marina Mazzoni, Lorenzo Capineri, Arianna Menciassi, Petar Petrovic, Eduardo Palermo e Calogero Maria Oddo, Haptic Glove and Platform with Gestural Control For Neuromorphic Tactile Sensory Feedback In Medical Telepresence, Sensors 2019.