MOTU
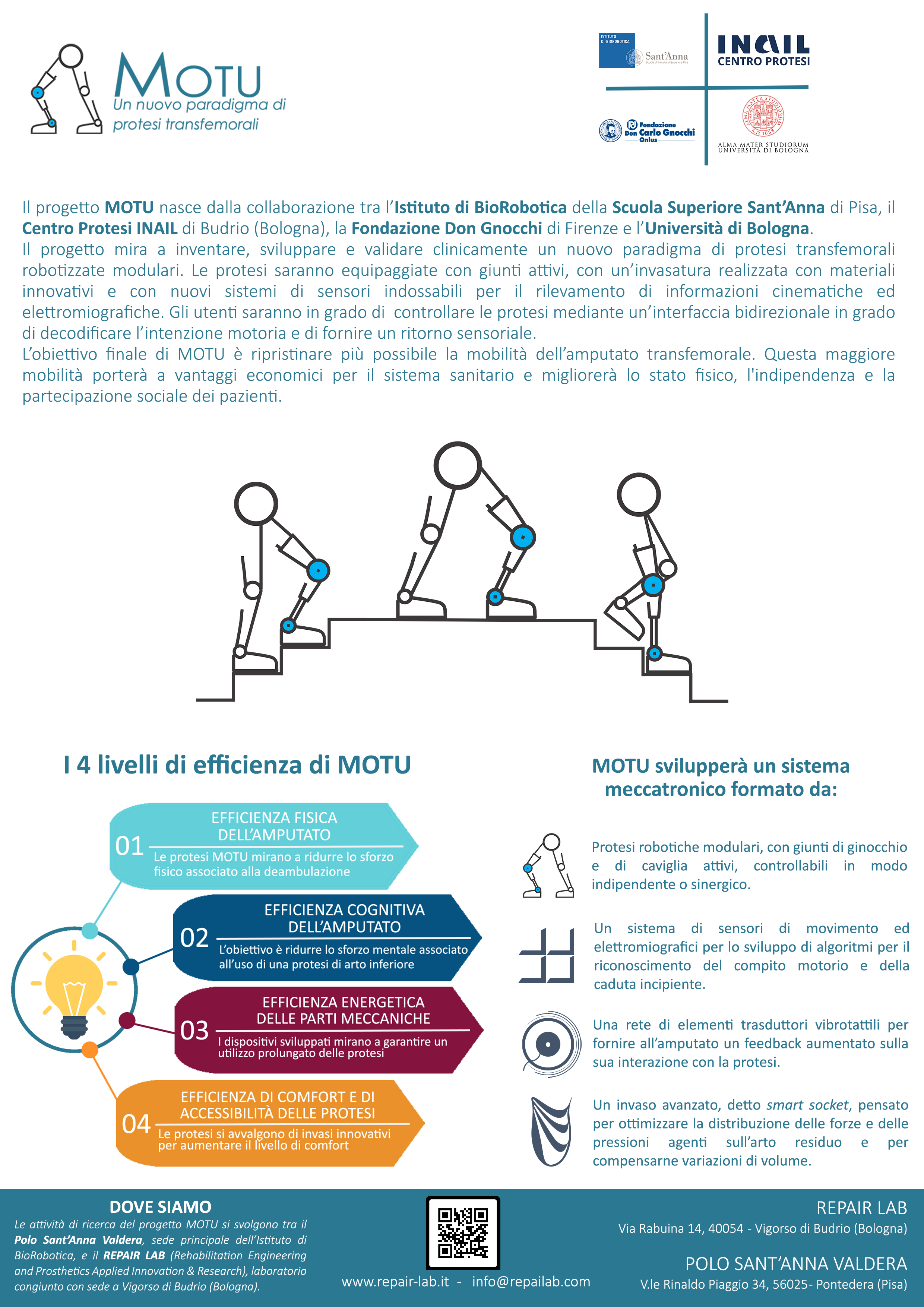
The MOTU project is a collaboration between The BioRobotics Institute of Scuola Superiore Sant’Anna, INAIL National Workers’ Compensation Prosthetic Center, Fondazione Don Gnocchi and Electrical, Electronic and Information Engineering Guglielmo Marconi (University of Bologna).
The global goal of the project is to perform research activities to design, develop and clinically validate a novel paradigm of robotic transfemoral prosthetic systems.
The MOTU prosthesis will be equipped with active robotic joints and a novel smart socket, developed by means of innovative techniques and materials. MOTU prosthesis will be interfaced with the user by means of a bidirectional interface that is able to decode amputee’s movement intentions and provide him/her with an augmenting sensory feedback with the goal of enhancing the residual motor skills.
Moreover, a novel wireless wearable sensory system will be designed in order to record kinematic and electromiographic information embedded in the robotic prosthesis, shoes, socket and user’s clothes.
The whole MOTU system will be developed to improve four different efficiency levels: the amputee’s physical and cognitive efficiency (in order to reduce the effort required to perform locomotion-related activities in terms of metabolic consumption and cognitive resources), the comfort and acceptability of the prosthesis and the energetic efficiency of the active components of the system, in order to guarantee extended use of the prosthetic device in activities of daily living.
The goal of the MOTU system will be to restore, at least partially, transfemoral amputees’ mobility fostering the benefits of an improved motor activity by relieving the user from a physical and psychological disability status. Promoting mobility will enhance not only autonomy and social inclusion of the end user but also will improve the economic aspects of the healthcare system.
This project has a strong synergy with the activities carried out in the H2020 CYBERLEGs Plus Plus project.
Download the Flyer of the project and the new Logo
Principal Investigators:
Prof. Nicola Vitiello
Ing. Angelo Davalli
Dot.ssa Simona Castellano
Publications:
- M. Guaitolini, F. Aprigliano, A. Mannini, A. M. Sabatini, V. Monaco, “Effects of Gait Speed on the Margin of Stability in Healthy Young Adults,” in Converging Clinical and Engineering Research on Neurorehabilitation III, 2019, pp. 420–424.
- F. Barberi, F. Aprigliano, E. Gruppioni, A. Davalli, R. Sacchetti, A. Mazzoni, S. Micera, “Fast Online Decoding of Motor Tasks with Single sEMG Electrode in Lower Limb Amputees,” in Wearable Robotics: Challenges and Trends, 2019, pp. 110–114.
- I. Cesini, G. Spigler, S. Prasanna, D. Taxis, F. Dell’Agnello, E. Martini, S. Crea, N. Vitiello, A. Mazzoni, C. M. Oddo, “A Wearable Haptic Feedback System for Assisting Lower-Limb Amputees in Multiple Locomotion Tasks.” International Symposium on Wearable Robotics. Springer, Cham, 2018.
- M. Filosa, I. Cesini, E. Martini, G. Spigler, N. Vitiello, C. M. Oddo, S. Crea, “A New Sensory Feedback System for Lower-Limb Amputees: Assessment of Discrete Vibrotactile Stimuli Perception During Walking.” International Symposium on Wearable Robotics. Springer, Cham, 2018.
- L. Paternò, M. Ibrahimi, E. Rosini, A. Menciassi, L. Ricotti, “Transfemoral Residual Limb Volume Change Due to Physical Activity”, In: L. Masia, S. Micera, M. Akay, J. Pons (eds) Converging Clinical and Engineering Research on Neurorehabilitation III. ICNR 2018. Biosystems & Biorobotics, vol 21.
- L. Paternò, M. Ibrahimi, E. Gruppioni, A. Menciassi, L. Ricotti, “Sockets for limb prostheses: a review of existing technologies and open challenges”, IEEE Transactions on Biomedical Engineering, IEEE Transactions on Biomedical Engineering, vol. 65, no. 9, pp. 1996-2010, Sept. 2018.
- L. Paternò, M. Ibrahimi, E. Rosini, A. Menciassi, L. Ricotti, “Residual Limb Volume Fluctuations in Transfemoral Amputees”, 6th Italian Bioengineering Group Congress – GNB, 2018 June 25-27, Milan, Italy.
- V. Papapicco, A. Parri, E. Martini, V. Bevilacqua, S. Crea and N. Vitiello, “Locomotion Mode Classification Based on Support Vector Machines and Hip Joint Angles: A Feasibility Study for Applications in Wearable”, Robotics –Springer Proceedings in Advanced Robotics, June 2018.
- F. Sorgini, L. Massari, J. D'Abbraccio, E. Palermo, A. Menciassi, P. B. Petrovic, A. Mazzoni, M. C. Carrozza, F. N. Newell, C. M. Oddo, "Neuromorphic Vibrotactile Stimulation of Fingertips for Encoding Object Stiffness in Telepresence Sensory Substitution and Augmentation Applications", Sensor, Volume 18, Issue 1, January 2018.
- M. Ibrahimi, L. Paternò, L. Ricotti, A. Menciassi, “Design of a socket with variable stiffness for lower limb prosthesis”, 29th Conference of the international Society for Medical Innovation and Technology, 9 – 10 November 2017, Torino, Italy.