Medical robotics, a novel 3D printing method for fabricating small-scale magnetic soft robots has been developed in a study coordinated by the BioRobotics Institute of the Sant'Anna School

A novel 3D printing method for the fabrication small-scale magnetic soft robot has been presented in a study coordinated by the BioRobotics Institute of the Sant’Anna School and published in the journal Advanced Functional Materials. The novel 3D printing system is a significant next step that can open up many new applications, especially in the medical field. “Instead of using a different fabrication method each time we want a different magnetic soft robot, now we have a single streamlined fabrication method for almost all future small-scale magnetic soft robots” says Hasan Dad Ansari Mohammad, first author of the study and PhD student at The BioRobotics Institute.
This work was carried out under the joint supervision of the Surgical Robotics and Allied Technologies Area of the BioRobotics Institute, coordinated by prof. Arianna Menciassi, and of the Robot-Assisted Surgery Group of the Department of Mechanical Engineering at KU Leuven, Belgium as a part of the ATLAS project. ATLAS (acronym of ‘AuTonomous IntraLuminAl Surgery’) aims at developing smart flexible robots that autonomously propel through complex deformable tubular structures. This project has received funding from the European Union's Horizon 2020 research and innovation programme under the Marie Sklodowska-Curie grant agreement No 813782.
The validation of the new 3D printing method and the fabrication of three robot prototypes
Soft magnetic robots are a very attractive research field especially in hard to reach places, for example, inside the human body due to their inherent safety and remote actuation capabilities. Different parts of the soft robots, when programmed accordingly, can interact differently with the external magnetic fields resulting in a highly complex deformation in the soft robot.
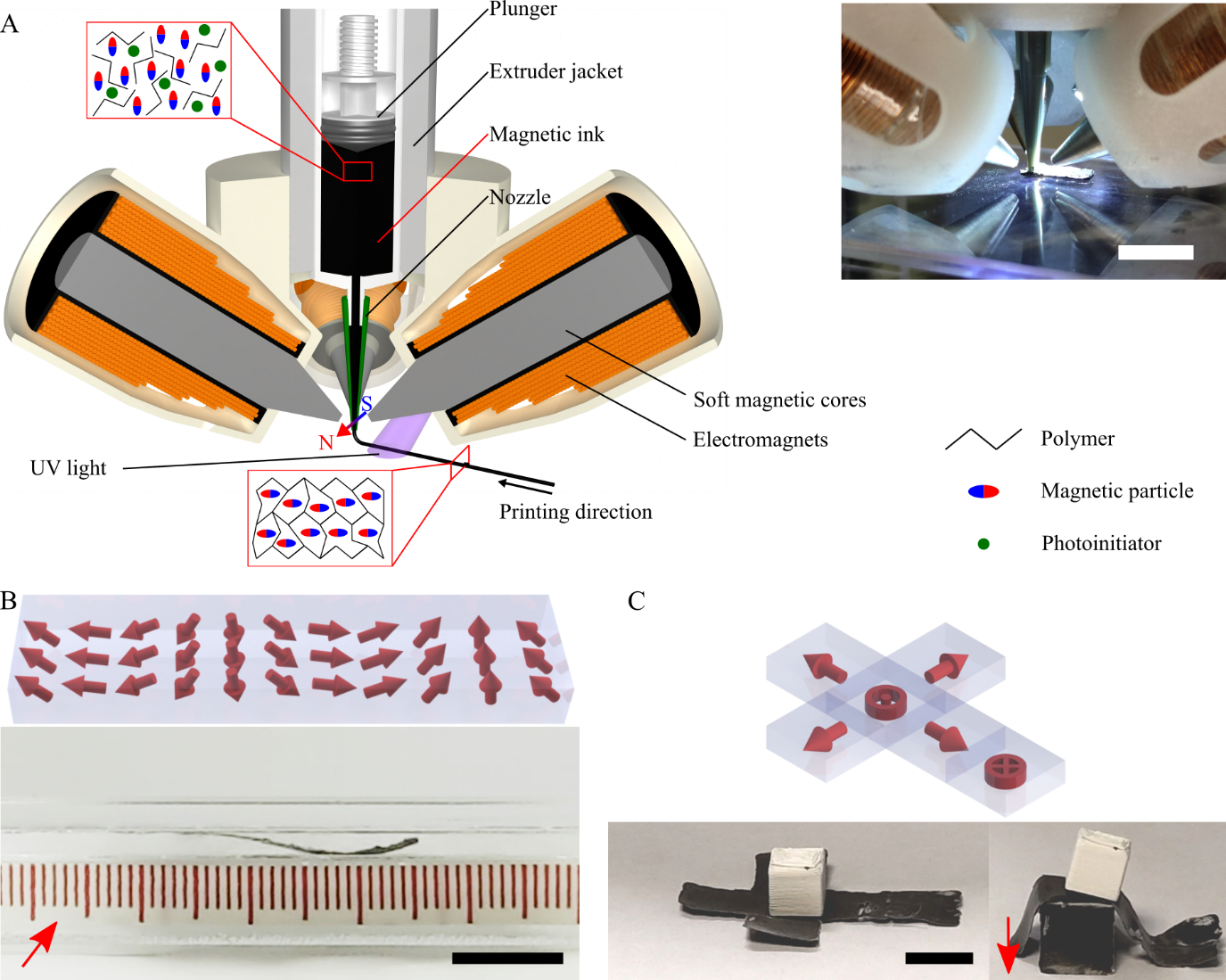
The study worked on this problem by using a commercial extrusion-based 3D printer with magnetic ink. An electromagnetic coil system integrated with the 3D printer helps with programming the magnetization into the printed structure. An extensive range of 3D structures with a very wide range of magnetization profiles can be printed directly using the method presented by researchers (Figure in Gallery).
The study proved the effectiveness of the fabrication method in imparting arbitrary magnetization profiles by repeatably and successfully generating specific magnetization directions in the printed structures. The capabilities of 3D printing process have been validated by printing and testing three exemplary small-scale soft robot prototypes: a thin string twisting robot, a ribbon robot able to travel in narrow lumina, and a folding robot able to transport cargo.