Robotica medica, grazie a uno studio coordinato dall’Istituto di BioRobotica della Scuola Sant’Anna è stato sviluppato un nuovo metodo di stampa 3D per la fabbricazione di robot magnetici su piccola scala

Un nuovo metodo di stampa 3D per la fabbricazione di microrobot magnetici morbidi è stato presentato in uno studio coordinato dall’Istituto di BioRobotica della Scuola Superiore Sant’Anna e pubblicato sulla rivista Advanced Functional Materials. Il nuovo sistema di stampa 3D rappresenta un importante passo in avanti nella fabbricazione di robot magnetici che può aprire la strada a nuove applicazioni, soprattutto in ambito medico. “Invece di usare un metodo diverso ogni volta che vogliamo fabbricare un robot magnetico morbido, grazie a questo studio abbiamo un unico metodo di fabbricazione semplificato per quasi tutti i futuri microrobot magnetici morbidi” dichiara Hasan Dad Ansari Mohammad, primo autore dello studio e studente PhD dell’Istituto di BioRobotica della Scuola Superiore Sant’Anna.
La ricerca è stata realizzata sotto la supervisione della Surgical Robotics and Allied Technologies Area dell’Istituto di BioRobotica, coordinata dalla professoressa Arianna Menciassi, e della Robot-Assisted Surgery Group of the Department of Mechanical Engineering dell’Università di Leuven (Belgio), nell’ambito del progetto europeo ATLAS (AuTonomous intraLuminAl Surgery), che mira a sviluppare robot flessibili intelligenti che si muovono autonomamente attraverso complesse strutture tubolari deformabili.
La validazione del nuovo metodo di stampa 3D e la fabbricazione di tre prototipi di robot
I robot magnetici morbidi hanno la capacità di muoversi in luoghi impervi e difficili da raggiungere, come ad esempio l’interno del corpo umano, grazie alla loro sicurezza intrinseca e alle capacità di controllo remoto. Le diverse parti dei robot morbidi, se programmate di conseguenza, possono interagire in modo diverso con i campi magnetici, dando luogo a una deformazione molto complessa. Nello studio pubblicato su Advanced Functional Materials, i ricercatori dell’Istituto di BioRobotica sono riusciti a creare un nuovo metodo di stampa 3D per la realizzazione di microrobot magnetici attraverso il quale sarà possibile stampare direttamente una vasta gamma di strutture 3D con un'ampia gamma di profili di magnetizzazione.
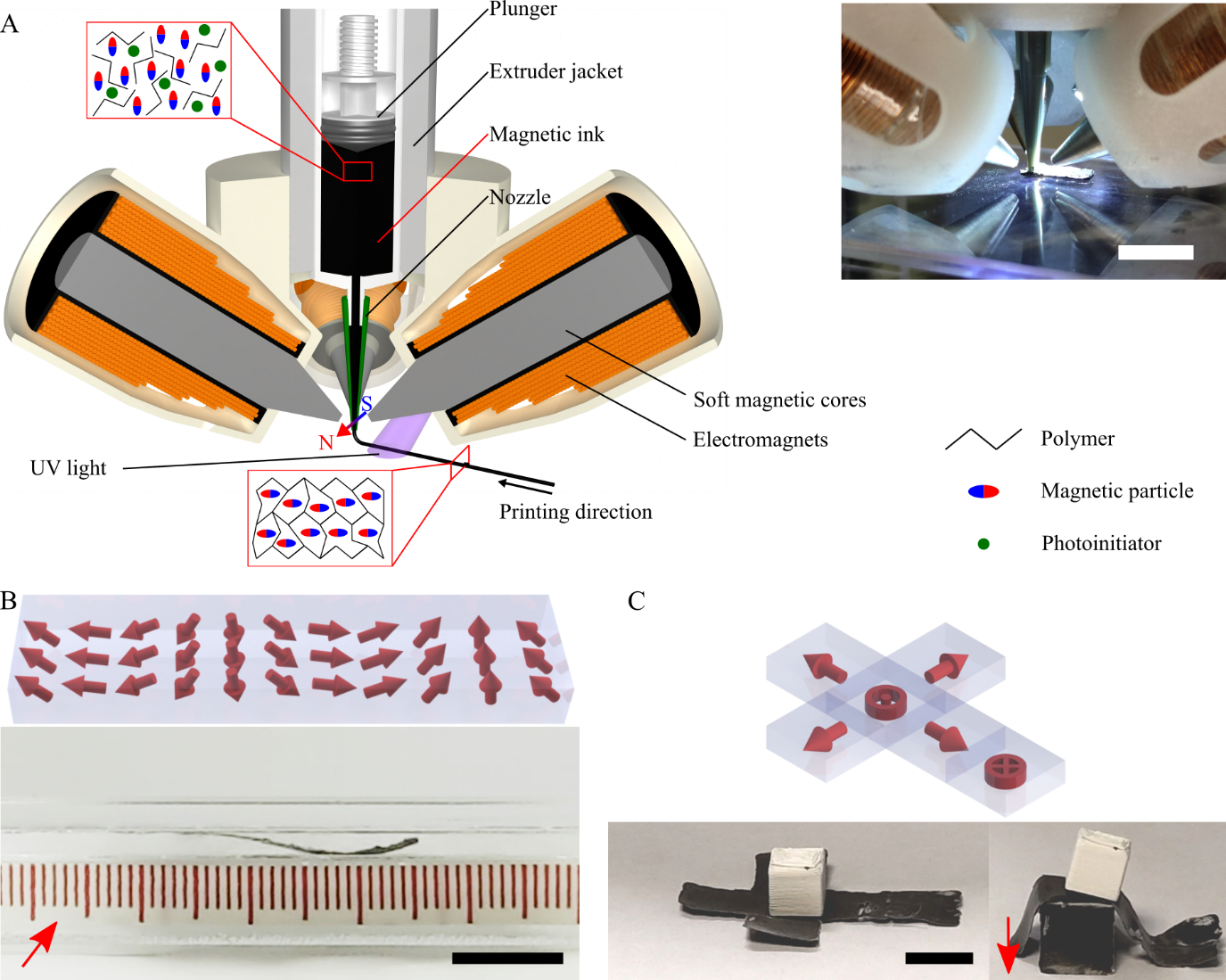
Il sistema ha notevoli gradi di innovazione come ad esempio la presenza di bobine elettromagnetiche integrate nella stampante 3D che aiuta a programmare la magnetizzazione nella struttura stampata.
Il nuovo metodo è stato testato e validato attraverso tre casi studi, la realizzazione di tre prototipi di microrobot, ognuno dei quali con caratteristiche diverse: un robot filiforme in grado di ruotare attorno al proprio asse; un robot sottile in grado di compiere moto ondulatorio in dotti molto stretti; un robot pieghevole in grado di trasportare oggetti.