
Bio
Matteo Cianchetti is currently Associate Professor with The BioRobotics Institute, Scuola Superiore Sant’Anna where he leads the Soft Mechatronics for Biorobotics Lab with a team of 13 people. He received the MSc degree in Biomedical Engineering (cum laude) from the University of Pisa, Italy, in 2007 and the PhD degree in Biorobotics (cum laude) from Scuola Superiore Sant’Anna. He is author or co-author of more than 50 international peer reviewed papers and he regularly serves as a reviewer for more than 25 international ISI journals and for several supporting agencies.
He has been and currently is involved in EU-funded projects with the main focus on the development of Soft Robotics technologies: OCTOPUS IP, STIFF-FLOP IP, I-SUPPORT, RoboSoft CA, SMART-E Marie Curie ITN, Hybrid Heart, SoftGrip, AInCP, SWAG, ARISE, and MAESTRI to name a few.
Ricerca
His main research interests include the study and development of new systems and technologies based on soft/flexible materials for soft actuators, smart compliant sensors and flexible mechanisms.
The framework for the research activities led by Matteo Cianchetti to date is Soft Robotics with focus on Soft Mechatronics for Biorobotics (also the name of the Laboratory he currently heads).
His research activities mainly focus on the development of soft mechatronics technologies both as enabling technologies and for specific applications in different fields. In the OCTOPUS (EU funded) project, he had the opportunity to apply the principles of bioinspired robotics, effectively translating biologically inspired concepts into artificial technologies[1]. At the same time, he was the technical team leader of a group of four scientists investigating how to develop a completely soft 8-arm octopus-like robot.

In this context, he acquired theoretical and hands-on experience on several technologies such as ElectroActive Polymers (EAP), Shape Memory Alloys (SMA), Flexible Fluidic Actuators (FFA) and Jamming-based technologies. Other than actuation, he also explored new possibilities for soft sensing especially using smart stretchable textiles and conductive fluids.
In the last few years these technologies have demonstrated their potential in sensing and actuation, thus while working on the improvement of these investigated solutions and on the development of new enabling technologies, he spent efforts in their use in specific applications where a compliant yet effective interaction is required:
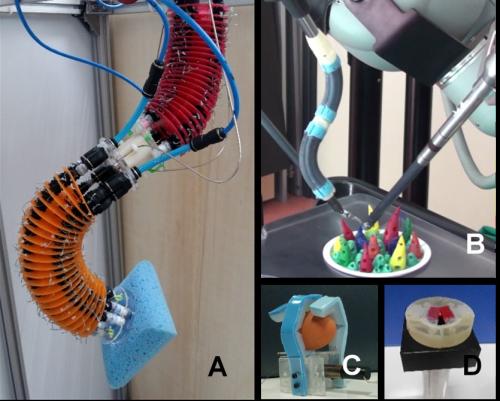
- in assistive robotics, the EU funded I-SUPPORT project aims at developing a new smart and soft arm (a soft robotic shower) that assists elderly people in executing bathing tasks (frame A);
- in surgery, within the EU funded STIFF-FLOP project, he investigated a novel generation of soft and variable stiffness surgical manipulators with unprecedented dexterity[2] (frame B);
- in manufacturing, innovative compliant tools for grasping and manipulation have been developed within the EU funded SMART-E project (frame C);
- in the area of artificial organs, recently, he has received a grant within the EU funded Hybrid Heart project for the development of an artificial heart that relies on a hybrid combination of soft robotics, tissue engineering and wireless energy transfer.
- In the food industry, he recently received a grant from the EU, to serve as a coordinator for the SoftGrip project for the development of soft gripper for the harvesting of mushrooms;
- In the neurodevelopmental engineering field, he is contributing to the development of a soft/conformable wearable system to monitor infant movements with an ecological approach.
Moreover, novel solutions for wearable robotics, realistic soft simulators of body parts (frame D) are other examples of other activities Matteo Cianchetti led or supervised where these new smart and soft-bodied technologies are being exploited.
First results in technology transfer are also visible. A big oil and gas company asked for a novel technological solution based on soft robotics to face the issue of inspection and restoration of pipelines. A collaboration with an international company leader in sportswear and equipment is leading to novel technological solutions for improving performances and safety. As a personal initiative, he is the promotor of a collaboration with 2 companies for the development of an educational kit based on soft robotics technologies.
Matteo Cianchetti is also very active in the Soft Robotics international community, being directly involved in the RoboSoft Coordination Action for promoting the diffusion of the soft mechatronics technologies and for coordinating efforts among European soft-roboticists actors in developing new solutions. With the sup-port of this consolidated network, Matteo Cianchetti contributed to the organization of two successful editions of the “Soft Robotics Week”, an event dedicated to soft robotics with international plenary speakers, summer schools and robotic competitions. He has been appointed as Local Chair for organizing the first edition of the IEEE-RAS International Conference on Soft Robotics - RoboSoft 2018 and Program Chair for RoboSoft 2022. He is also serving as corresponding Chair for the IEEE TC on Soft Robotics.
[1] Nature video – Soft Robots (https://www.youtube.com/watch?v=A7AFsk40NGE)
[2] BBC World News – How the octopus inspires surgical tools (http://www.bbc.co.uk/programmes/p04jbqvj)
Pubblicazioni
Brevetti
Corsi
Soft Robotics Technologies (2021-ongoing)
within the two-year M.Sc. program in Bionics Engineering jointly held by the University of Pisa and the Scuola Superiore Sant’Anna.
Practical Finite Element Analysis (2023-ongoing)
within the PhD program in BioRobotics of the BioRobotics Institute of the Scuola Superiore Sant’Anna.
Soft and smart materials for Bionics (2015-2021)
within the two-year M.Sc. program in Bionics Engineering jointly held by the University of Pisa and the Scuola Superiore Sant’Anna.
Innovative actuation technologies (2013-2021)
within the PhD program in BioRobotics of the BioRobotics Institute of the Scuola Superiore Sant’Anna.